


Ing taun-taun pungkasan, kanthi popularitas Internet sing terus-terusan, e-commerce berkembang kanthi cepet. Komoditas pesenan pelanggan nuduhake karakteristik macem-macem jinis, sawetara batch lan wektu pangiriman sing cendhak, sing ndadekake Kapadhetan panyimpenan rak-rak ing pusat distribusi logistik supplier terus saya tambah. Frekuensi bahan mlebu lan metu saka gudang saya tambah akeh. Jumlah bagean cilik sing dipilih saya tambah saben dina. Luwih akeh pusat distribusi logistik nggunakake barang adhedhasar mobil anter jemput menyang sistem pemilihan wong.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
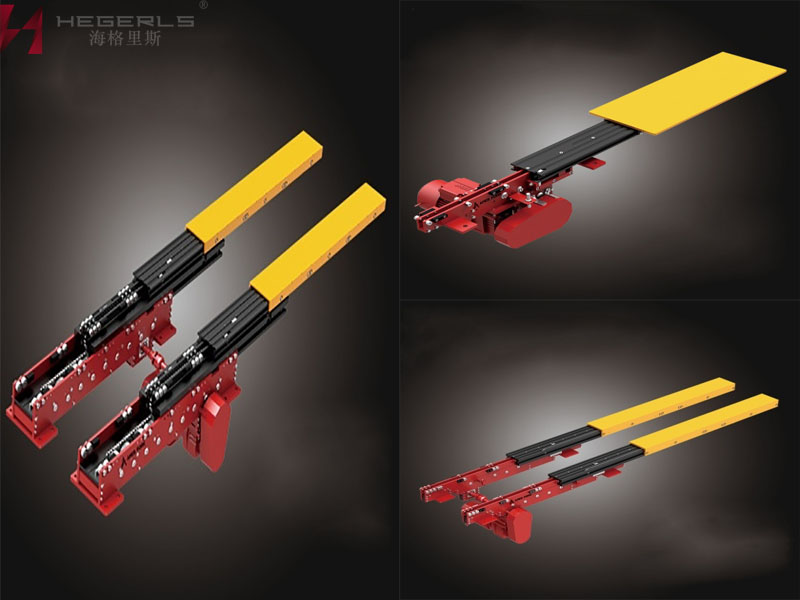
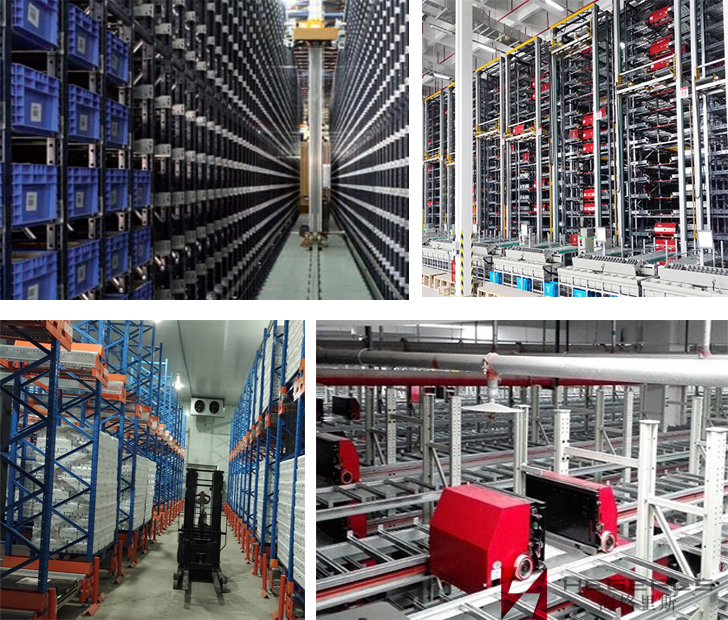
Clamping teleskopik garpu digunakake digunakake ing peralatan panyimpenan otomatis kayata stereo warehouse multi-lapisan anter jemput mobil, beting jinis tong sampah AGV, RGV, lan mbukak mini. Bobot maksimal kothak materi sing dicekel HEGERLS bisa nganti 50Kg. Jembar clamping saka lengen garpu bisa diatur sewenang-wenang ing sawetara 200 ~ 600mm. Lelungan milih maksimal yaiku 840mm. Kacepetan operasi maksimal garpu teleskopik yaiku 1.5m / s, lan akselerasi yaiku 1.2m / s ². Gangguan operasi dikontrol ing 75dB, sing bisa nyukupi syarat paling akeh rak ekstensi siji lan kaping pindho. HEGERLS uga bisa ngatur gudang stereoskopik mobil anter jemput multi-lapisan kothak garpu teleskopik gripping miturut syarat tartamtu saka pelanggan, kayata jembaré gripping, njupuk stroke lan paramèter liyane.
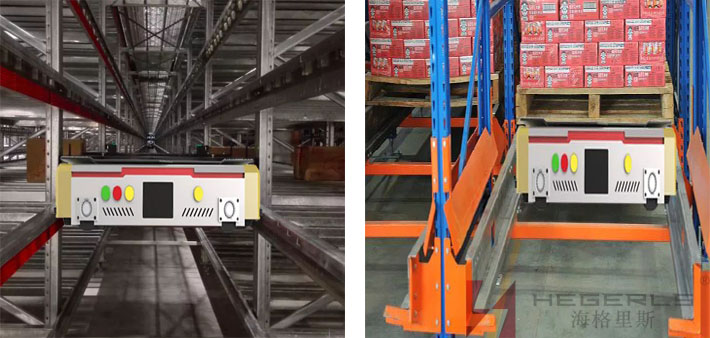
Bagean ing Hiygris HEGERLS nyekel kothak garpu teleskopik multi-lapisan gudang stereo mobil anter jemput Garpu teleskopik minangka mekanisme teleskopik sing digunakake ing gudang stereo lan sistem panyimpenan otomatis logistik kanggo panyimpenan utawa transfer materi. Nduwe fungsi ekspansi otomatis rong arah sing fleksibel lan fungsi watesan sing akurat! Bisa langsung dipasang ing stacker, utawa dipasang ing mekanisme ngangkat tetep, utawa dipasang ing platform ngangkat seluler. Stacker mlaku liwat dalan ing antarane rak kanggo ngakses utawa mindhah item kanthi otomatis! Bisa disambungake karo sistem baris produksi lan sistem manajemen perusahaan. Iki nggunakake teknologi komputer lan barcode (enkoder) kanggo mujudake manajemen lan operasi cerdas informasi!

Babagan HEGERLS Clamping Telescopic Fork
garpu gripper teleskopik HEGERLS minangka jinis garpu sing unik ing seri garpu teleskopik penumpuk, yaiku garpu teleskopik otomatis rong arah, uga dikenal minangka garpu gripper utawa garpu nyekel, garpu utawa garpu garpu. . Iki minangka garpu khusus digunakake kanggo mindhah tong sampah cilik. Bisa langsung nglumpuk ing multi-storey picking AGV utawa platform apa liyane, karo expansion saka lengen garpu lan genggaman saka tuas (pancing), Rampung akses utawa tumindak transfer!
Garpu gripper HEGERLS biasane digawe saka paduan aluminium, kanthi ukuran cilik, bobot entheng, kacepetan mlaku cepet lan ekspansi lancar. Ing wektu sing padha, uga nganggo prinsip sinkronisasi multi motor, nyadari yen mekanisme garpu teleskopik sing padha bisa digunakake kanggo nransfer utawa ngakses kothak kanthi spesifikasi sing beda. Iku ora mung èfèktif mbenakake efficiency panyimpenan, nanging uga nemen mbenakake tingkat panggunaan papan panyimpenan, utamané kanggo dhuwur-munggah dhuwur Intelligent warehousing intensif!
Klip HEGERLS ing struktur garpu teleskopik
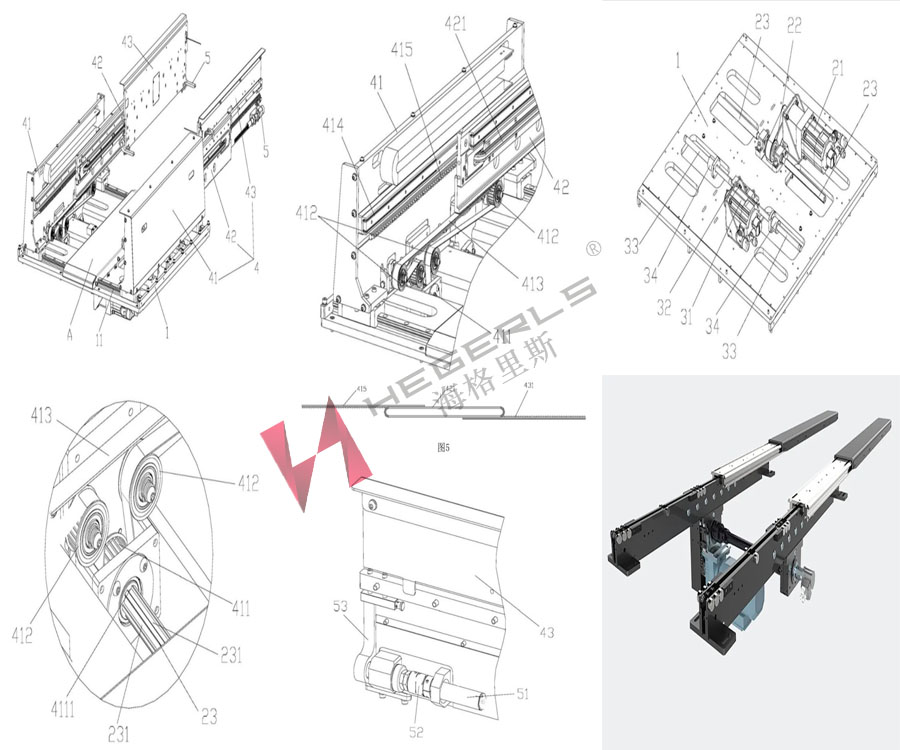
Struktur garpu gripper HEGERLS bisa dipérang dadi lokasi panyimpenan jero lan lokasi panyimpenan cethek. Lokasi panyimpenan jero yaiku lokasi panyimpenan kanthi rong kothak materi, lan lokasi panyimpenan sing cethek minangka lokasi panyimpenan kanthi siji kothak materi. Sing, lokasi panyimpenan jero bisa clamp loro kothak materi ing wektu, nalika lokasi panyimpenan cethek mung bisa clamp siji kothak materi ing wektu. Bedane garpu gripper HEGERLS lan garpu teleskopik dupleks biasa yaiku garpu tarik driji isih dumadi saka telung badan garpu, yaiku, awak garpu njero, awak garpu tengah lan awak garpu njaba, kajaba awak garpu ngarep. wis siji liyane rod tarik (pancing), kang cocog karo guide rail (slide rail), roller bar, setir sinkron, sabuk sinkron, fluent bar, shift rod (pancing), jacking shaft, wheel bar, drive motor (servo) , shift rod motor Instrumen deteksi lan komponen liyane mbentuk mekanisme teleskopik lengkap, kang cooperates karo lengen garpu teleskopik lan kopling tuas (pancing) kanggo ngrampungake akses utawa tumindak transfer!
Prinsip kerja klip HEGERLS ing garpu teleskopik
Lengen garpu saka garpu gripper HEGERLS ngadeg ing sisih lan disambungake ing sisih kanthi ril panuntun. Liwat kontrol, ril guide bisa geser bali lan kasebut kanggo nyetel jarak antarane loro tangan garpu garpu, supaya minangka kanggo entuk nggunakake umum saka garpu kanggo kothak materi multi specification! Nalika njupuk bahan, garpu ngluwihi menyang posisi panyimpenan materi, pancing retaining (tuas) kanthi otomatis ngedhunaké lan mblokir pasuryan mburi karton utawa kothak plastik, banjur garpu retracts, nyeret karton utawa kothak plastik kanggo tengah. garpu, lan banjur metu ing mbalikke miturut syarat gelar, pancing (lever) ditarik maneh, lan garpu retracts maneh kanggo ngrampungake tugas njupuk munggah utawa nransfer! Sanajan prinsip garpu gripper padha karo garpu teleskopik biasa, bagean transmisi, batang penghubung lan komponen liyane saka garpu driji beda banget. Digunakake kanggo njlèntrèhaké yèn setir chain, chain, pindah, rak, etc. utawa bahan paduan aluminium, dadi bobot garpu gripper mung udakara 80kg.
Kajaba iku, kudu dicathet yen sajrone desain garpu teleskopik jinis gripper, ukuran rak panyimpenan sing padhet, posisi vertikal rak kanthi kothak, level trek lan ukuran kothak kudu digabungake kanggo nemtokake paramèter sakabèhé saka extension forks (extension fork movement, box spacing, fork width, fork internal width, fork height, etc.), so as to meet the needs of containers on the shelves. Clamping garpu mung bisa nransfer utawa ngakses produk rangkep ing karton utawa kothak plastik èfèktif, lan ora bisa nransfer materi ora duwe aturan baku. Kajaba iku, volume lan bobot saka kothak materi sing ditransfer ngirim ora gedhe banget, lan bobot mbukak ngirim ora ngluwihi 100KG! Dhuwur garpu clamping umume dirancang miturut dhuwur tong sampah!
Babagan HEGERLS Clip on Shuttle
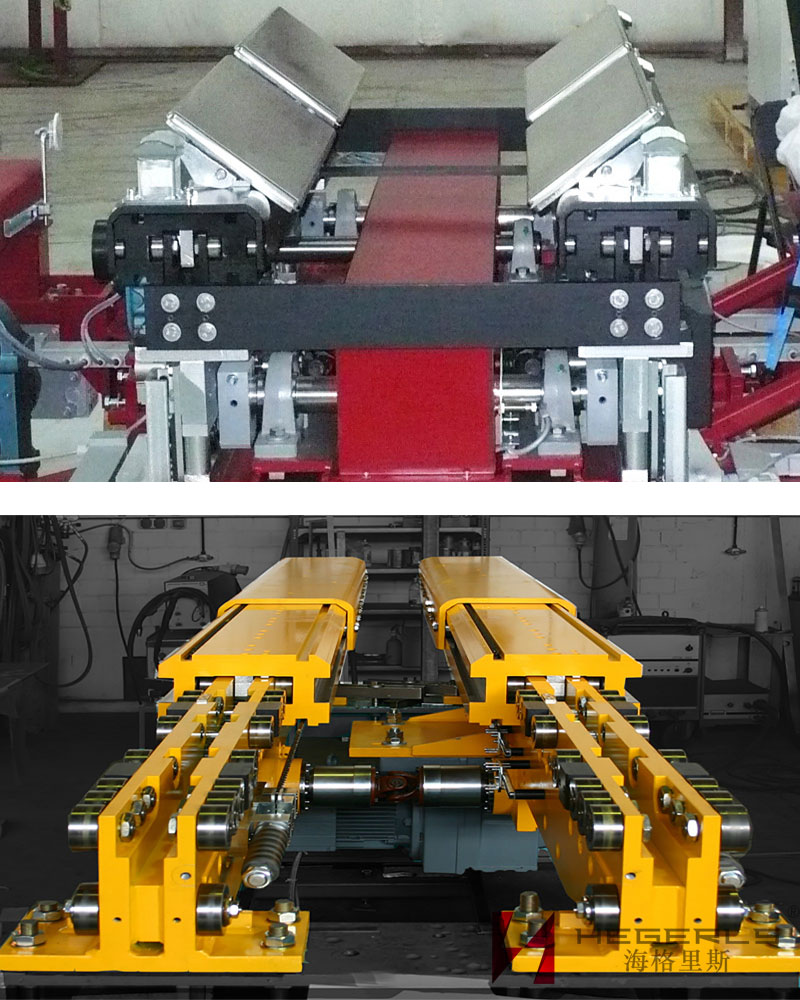
Struktur klip HEGERLS ing pesawat ulang-alik kasusun saka pigura shuttle, sasis shuttle, mekanisme lelungan, mekanisme ekstensi garpu sekunder, kolektor, piring bantalan lan platform bantalan. Struktur kasebut kaya ing ngisor iki:
Sembarang pigura anter jemput biasane rongga ditutup dumadi saka krenjang awak utama ing loro-lorone, Nihan lan krenjang hub utama, lan mungguh disusun ing loro ends saka sasis anter jemput; Cangkang diwenehake karo tutup ndhuwur sing bisa dibukak lan ditutup liwat engsel lawang turnover; Rak kabel panel disusun ing ndhuwur krenjang hub; Mekanisme lelungan kalebu roda nyopir, roda pasif, motor tanpa sikat DC, reducer lan poros penghubung; Loro-lorone pigura anter jemput ing salah siji mburi sasis anter jemput diwenehake karo driving wheel disambungake dening nyambungake shafts, lan loro-lorone saka pigura anter jemput ing mburi liyane saka sasis anter jemput kasedhiya karo gembong pasif disambungake dening nyambungake shafts; DC brushless motor cooperates karo reducer kanggo drive wheel nyopir lan drive pasif wheel; Poros nyambungake diwenehake karo encoder magnetik, ing ngendi posisi wiwitan lan mandheg saka anter jemput ing trek lurus dijupuk; Mekanisme ekstensi garpu sekunder disusun kanthi simetris ing sisih njero pigura mobil anter jemput; Sasis anter jemput antarane mekanisme extension garpu secondary kasedhiya karo platform prewangan kanggo manggonke basket kargo; Rongga tertutup pigura mobil anter jemput masing-masing diwenehake karo piring bantalan, ing ngendi piring nyopir, piring kontrol utama mekanisme lelungan lan piring kontrol utama mekanisme ekstensi garpu disusun kanthi urutan; Plat nyopir drive mekanisme lelungan kanggo drive anter jemput kanggo mbukak ing trek lurus. Papan kontrol utama saka mekanisme lelungan kontrol paramèter mlaku lan miwiti posisi mandeg saka anter jemput, lan Papan kontrol utama mekanisme extension garpu kontrol mekanisme extension garpu secondary kanggo njupuk lan nyelehake basket ing beting; Piranti ngumpulake disetel ing antarane mobil anter jemput lan trek lurus, sing disambungake karo kabel listrik sing disusun ing jalur lurus lan digunakake kanggo nyuplai daya kanggo mobil anter jemput. Fitur struktural klip ing mobil anter jemput cerdas kanggo panyimpenan uga dumunung ing grooves sing disetel ing posisi ngendi setir nyopir lan setir pasif mungguh kontak batang nyambungake, lan ring retainer lentur disetel ing alur kanggo mbentuk sumbu. posisi setir nyopir lan setir pasif. Roda guide pindho mungguh disetel ing sisih sasis anter jemput ing setir nyopir lan setir pasif, lan antarane trek terus lan sasis anter jemput. Roda panuntun pindho mbentuk wates kiwa lan tengen nalika setir nyopir lan setir pasif mlaku ing trek lurus. Mekanisme ekstensi garpu sekunder kalebu: piring push ekstensi garpu tingkat pertama, piring ekstensi garpu tingkat kapindho, mekanisme katrol sinkron tingkat kapindho, mekanisme drive ekstensi garpu tingkat kapindho, motor drive ekstensi garpu, reducer liyane, lan poros drive ; Sisih njaba krenjang hub pigura mobil anter jemput diwenehake karo tataran pisanan garpu extension push plate; A chute U-shaped wis disusun ing tengah tataran pisanan garpu meksa nindakake perkara piring, lan sawetara U-shaped chute pulleys disusun ing interval witjaksono ing chute U-shaped; Piring garpu sekunder disusun ing njaba chute berbentuk U; Piring garpu secondary disambungake karo sawetara pulleys alur U-shaped liwat bolts lan perkakas; Ujung ndhuwur piring ekstensi garpu tataran kaping pindho diwenehake karo garpu shift, motor pengurangan planet DC lan sensor fotoelektrik saka njaba menyang njero; Sensor fotoelektrik digunakake kanggo njupuk sinyal posisi garpu lan dikirim menyang papan kontrol utama mekanisme extension garpu, sing ngontrol motor reducer planet DC kanggo drive garpu kanggo mindhah horisontal utawa vertikal; Mekanisme pulley sinkron sekunder disusun ing piring nyurung garpu utami lan langsung ing ngisor lan ndhuwur chute berbentuk U; Mekanisme pulley sinkron sekunder disambungake karo piring pencet sabuk sinkron ing piring extension garpu sekunder; Motor drive extension garpu lan reducer liyane drive mekanisme drive extension garpu sekunder kanggo mindhah, lan drive mekanisme drive extension garpu sekunder ing sisih liyane kanggo mindhah liwat batang drive, supaya extension garpu utami push plate gerakane lan drive secondary. mekanisme katrol sinkron kanggo mindhah, mangkono nyopir piring extension garpu secondary kanggo mindhah. Mekanisme transmisi ekstensi garpu rong tahap kalebu encoder magnetik, katrol sabuk sinkron I, sabuk sinkron I, piranti tensioning wheel lan rak; A katrol timing belt 1 lan timing belt 1 disusun ing ngisor piring nyurung garpu tataran pisanan; Siji sisih katrol sabuk sinkron I disambungake karo poros transmisi, lan sisih liyane disambungake karo poros output saka reducer liyane liwat keyway. Piranti tensioner wheel mungguh disetel ing loro-lorone saka reducer liyane kanggo fiksasi tambahan saka katrol sabuk sinkron I lan sabuk sinkron I; Rak disusun ing antarane piring nyurung garpu tahap pertama lan sabuk sinkron; Motor drive extension garpu lan reducer liyane nyopir katrol sabuk sinkron I lan sabuk sinkron I kanggo muter, lan nyopir katrol sabuk sinkron II lan sabuk sinkron II ing sisih liya kanggo muter liwat poros transmisi. Ing wektu sing padha, rak ing loro-lorone drive piring push extension garpu utami cocog kanggo entuk extension garpu utami. Nalika mekanisme katrol sabuk salaras secondary gerakane synchronously lan drive plate extension garpu secondary kanggo mindhah, katrol U-shaped nggulung ing chute U-shaped, Nggawe piring extension garpu secondary éling extension garpu secondary. Piranti tensioning wheel kalebu: bolt, nyetel krenjang, pindho nut lan tensioning wheel; A wheel tensioning disusun ing ngisor sabuk sinkron aku lan ing loro-lorone saka reducer liyane, lan tetep ing krenjang awak utama liwat nut pindho; krenjang nyetel diatur ing nut pindho liwat bolt, lan posisi krenjang nyetel diatur dening bolt, supaya krenjang nyetel drive nut pindho kanggo mindhah munggah lan mudhun, supaya sabuk sinkron aku bisa njaga negara tension ing tumindak rodha tensioning.
Kepiye carane bis shuttle HEGERLS bakal entuk manfaat kanggo perusahaan?
Pisanan, mekanisme lelungan, mekanisme ekstensi garpu lan pigura, garis kontak geser lan piranti koleksi daya saka mobil anter jemput cerdas HEGERLS kanthi klip ing panyimpenan diatur kanthi wajar, sing ndadekake nggunakake spasi mobil anter jemput, lan bisa adaptasi karo panyimpenan otomatis lan njupuk barang saka specifications beda lan lokasi ing Warehouse telung dimensi, ngembangaken jangkoan aplikasi saka mobil anter jemput, lan cepet lan èfèktif ngrampungake seri tumindak terus-terusan saka mobil anter jemput, kayata lumampah, extension garpu, njupuk munggah lan manggonke barang, Iku nyadari panyimpenan cepet lan akurat barang, mangkono nemen Ngapikake efficiency operasi lan tingkat teknologi automation saka gudang otomatis, lan ngurangi biaya investasi Enterprises. Ing wektu sing padha, iku prasaja lan entheng ing struktur, dhuwur ing linuwih, lan gampang kanggo njaga. Bisa ngganti stacker dalan tradisional, nyadari keluwesan sistem, lan cocog karo tren pangembangan logistik e-commerce lan otomatisasi gudang.
Kapindho, ing mekanisme lelungan saka mobil anter jemput cerdas HEGERLS, poros penghubung saka roda nyopir lan roda pasif diwenehake karo alur, lan bagean bantalan sing nyambungake disambungake karo jinis dering retainer elastis anyar, nyadari efek posisi sumbu nyambungake. shafts; Kanthi nggunakake ring retainer elastis kanggo entuk efek posisi sumbu, efisiensi produksi bisa tambah lan biaya bisa disimpen.
Katelu: Mobil anter jemput cerdas Higelis HEGERLS kanggo nyimpen panyimpenan nyadari yen setir nyopir lan setir pasif tansah pindhah ing trek sing lurus tanpa nyimpang saka trek liwat struktur wheel guide pindho. Struktur posisi iki luwih stabil lan dipercaya.
Papat, struktur ekstensi garpu sekunder sing diadopsi dening mobil anter jemput cerdas HEGERLS bisa nggawe jarak ekstensi garpu luwih adoh lan entuk luwih akeh kranjang ing posisi sing beda-beda; Ing wektu sing padha, prinsip mekanisme extension garpu sekunder iku prasaja, lan biaya desain lan manufaktur kurang; Bagean transmisi nganggo mode motor tunggal + peredam + poros transmisi kanggo nggawe mekanisme ekstensi garpu sekunder tekan tujuan ekspansi lan kontraksi sinkron, sing ngirit biaya luwih akeh, kanthi efektif nyuda papan tata letak sing dibutuhake, lan nyuda bobot mobil anter jemput. .
Kalima, mobil anter jemput cerdas Higelis HEGERLS nganggo jinis piranti tensioning wheel anyar, sing bisa kanthi cepet njaga sabuk sinkron tensioned lan nyadari karya normal mobil anter jemput. Kajaba iku, piranti roda tension iki gampang digawe, trep kanggo nginstal lan bisa diatur kanthi cepet, sing ngirit biaya, ngirit ruang lan nambah efisiensi kerja.
Wektu kirim: Dec-19-2022